 Liaoran Blog
Liaoran Blog
Reinforcement Learning Notes
Reinforcement Learning study notes
Reinforcement Learning
Q:解决的目标问题?基础要素有哪些?核心是什么? A:相比于有监督和无监督学习,强化学习目标是求的代理人在不同环境下的最优决策。通过机器学习得到不同环境下代理人应该做出的最优决策,因此学习目标是一个决策,或者action,一种行动策略,而不是单一的数字。
基础要素主要有state, value, environment, reward, policy, return等。核心是MDP马尔可夫决策过程和Bellman equation。即agent在不同的state下,做出不同的action和environment进行互动,得到不同的return并且进入下一个state。
Bellman equation用来描述state value,当然也可以写成action value的形式。 state value = 当前state所有action的immediate reward期望和 + 所有未来可能达到的state的state value的期望和。 【可以用action value来表示,互相可转化】 bellman equation给出了评价policy的一种方式。 bellman optimal equation 给出了最佳state value的存在性。解贝尔曼最优方程即等价于,求解最佳的policy。
RL经典算法

Model Based
各个state下的转移状态矩阵已知,reward已知,agent了解所有信息。此时用动态规划,迭代求解bellman optimal function。 下面两种办法本质上都是迭代求解贝尔曼最优方程。
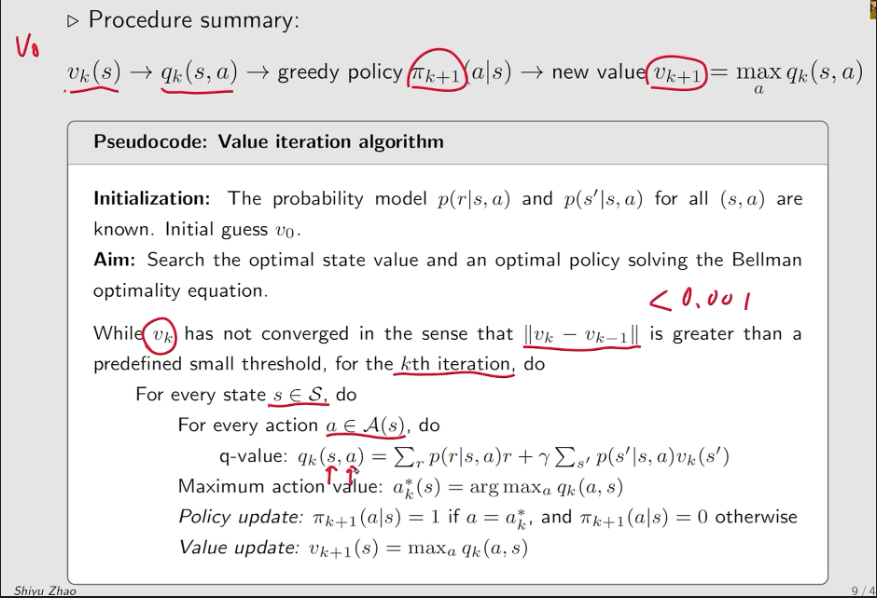
Value Iteration
核心理解:
- 本质上就是用贝尔曼公式,求解整个系统的State Value然后根据state value去进行最后的策略选择,整个计算过程中就算把pi的更新给拿掉,只在收敛后再取,也没有任何问题!
Policy Iteration
初始化Pi0,同样先做policy evaluation(这一步先迭代到最优的state value),然后更新最优策略pi,然后再做policy evaluation 做iteration

Model Free
现实状态,不知道转移状态矩阵,并且不知道reward函数概率,通过与环境互动得到的信息进行学习,更新策略。
Valued Based
通过学习各个state的价值函数,得到最优policy。
Monte Carlo Learning
用样本频率估计模型中的转移概率等。 本质上:
- 就是把Policy Iteration中的policy evaluation,从具体计算换成了抽样求平均估计而已
-【注意】这里的pseudocode并没有给出得到episode和return的算法!
-【注意】这里对每个state、action pair都要做N个episode进行return估计,因此太麻烦了【当然如果policy和env都是deterministic的话,就可以只取一个trajectory因为确定】
每步episode长度需要注意,尽量足够长

坏处:方法太过耗时。需要采样很多遍。 改进:exploting start方法, 策略每步迭代方法。
TD-Learning
本质:用类似RM算法的迭代的思想,从单一trajectory中 直接对state value、action value等进行估计。
本质上:用RM算法解决bellman equation。通过t+1时刻的reward和state value来更新 t时刻的状态价值函数。

On-Policy
用同一套策略,即用来产生state上的各种数据(s,a,r,s,a),又用产生的数据更新原始策略。 (显然MC也是on-policy的)
SARSA:

【后续】:有N-STEP SARSA 和 Expected SARSA
Off-Policy
用两套策略,一套策略用来和环境交互,产生信息记录;另一套策略使用产生的信息进行更新迭代。
Q-Learning:
本质上是直接解决贝尔曼的最优问题,因为存在max
on-policy版本:

off-policy版本:

Continuous Space
以上都是离散的状态-动作空间,类似于state-action的表格。在实际过程中,面对的大多是离散空间,因此,需要引入神经网络对value进行估计。
DQN
本质: 在DQN中:由于神经网络本身已经能够进行迭代找到最优参数,因此不需要再手动进行求导参数跟新。但问题在于神经网络拟合value function需要用到大量数据,这个数据本身是不能具有顺序和特殊分布的,也因此,在DQN中,引入了replay buffer和experience replay的想法,通过对已有策略不断产生样本,然后平均抽样放进网络模型中,这样能使神经网络估计的value function收敛,但这样的收敛只在一次数据的抽样中,并且目标函数(Yt)也是仅仅针对一次的数据产生的。由于每次数据抽样可能存在误差,因此要不断的进行迭代抽样,并且每隔一段时间用新的w替代目标函数中的参数w,这就是DQN“两个网络”设计的原因。整个不断抽样,并且定期更新参数的过程可以理解为,减少value approximation function 的 目标函数(损失函数)的bias,即让目标函数贴近真实的目标函数的过程。
最屌的设计: - Replay buffer - Double Net
DQN和普通Q-table的区别:
重点是:为什么Q-learning就要有experience replay,而Q-table没有
答: 因为
- Q-table实际上在直接解决一个bellman optimistic problem,实际不需要用到S,A的分布【实际上是类似于对每个(s,a)的点,求BOE得到q-value,只是求解的方法,用的是类似EM(SGD)算法,即对每个点都要遍历多次采样,然后公式的长相和这边functional approximation类似】;
- 但Q-functional approximation中,是用最优化的方法求解一个函数估计、最小化损失函数的问题,因此不是针对某一个(s,a)点的,而是对一整个action-value function的参数估计,因此需要进行样本采样,这个时候采样 用到的就是 experience replay
